
🔬 Ongoing Research Projects
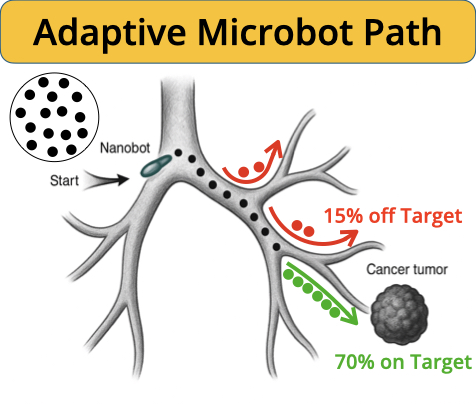
🔮 Nanobot Vascular Drug Delivery
Physics-informed AI controls microbot swarms navigating branching capillaries for precision targeted drug delivery in complex vascular networks.
💸 Partially by NSF — and Pending Learn More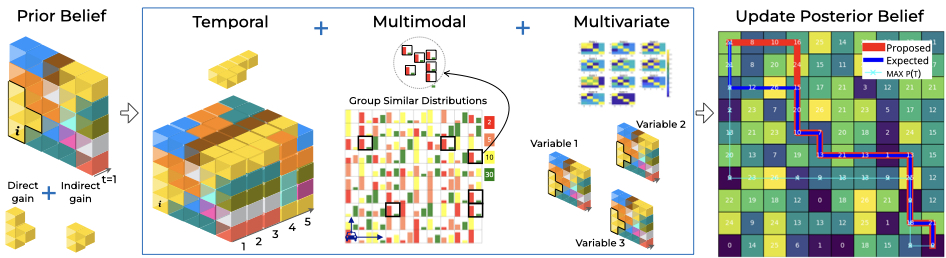
🤖 Data-driven Adaptive AI for Multiagent Autonomy
Mixed Entropy Adaptive Autonomy framework for real-time multi-agent coordination under uncertainty with energy-efficient path planning.
💸 NSF IIS — AFRL — and Pending Learn More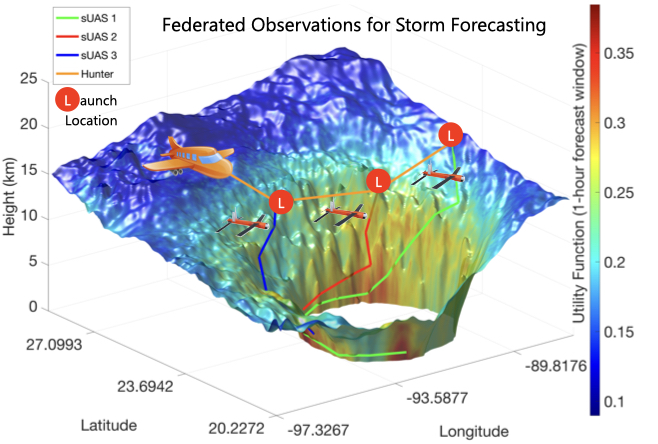
🌀 UAS-based Hurricane Sensing
Autonomous drone teams sense active tropical cyclones in real-time, maximizing utility while operating under strong wind field constraints.
💸 NASA JPL — ONR — and Pending Learn More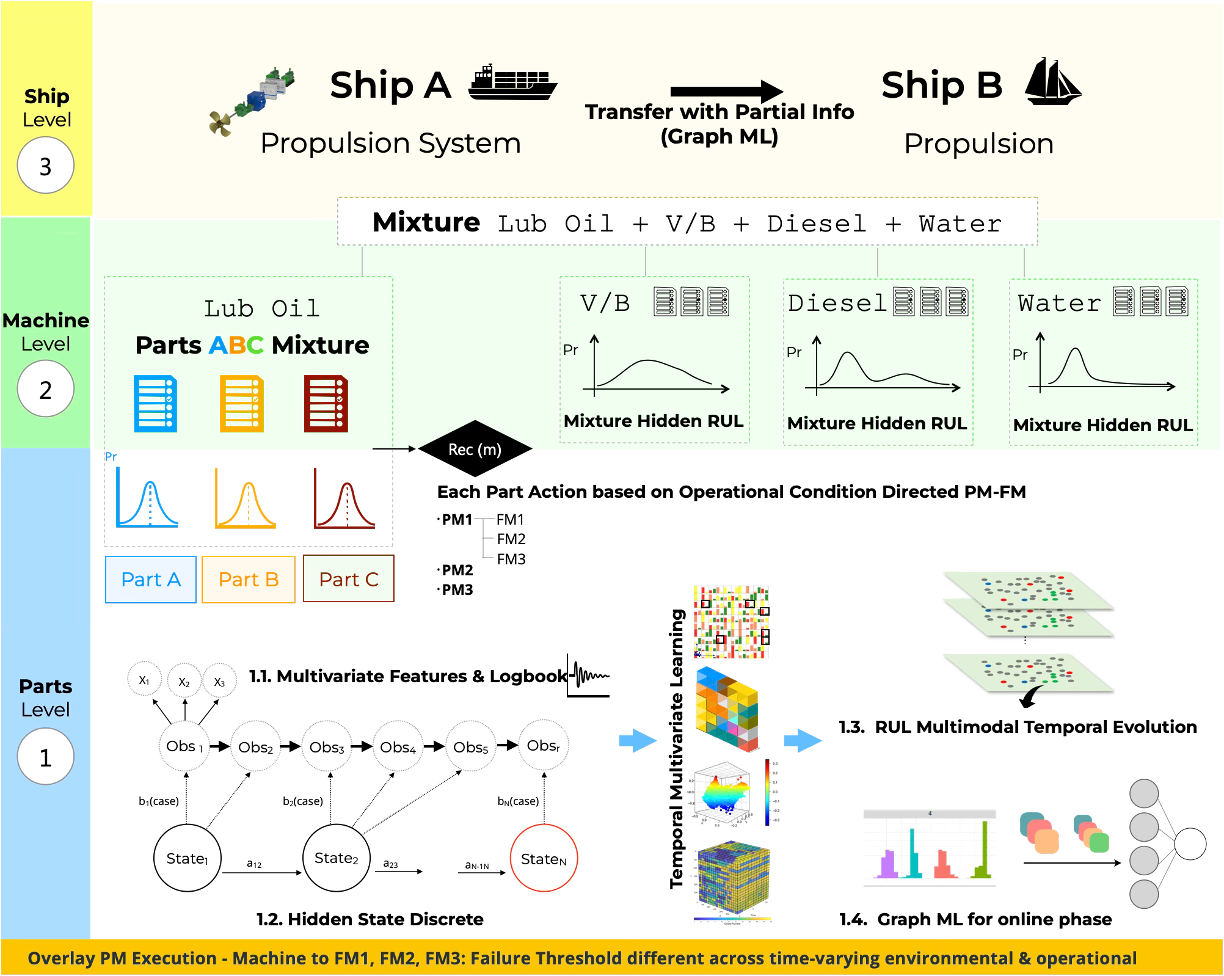
🚶 Multimodal Adaptive Condition-based Monitoring
Development of self-adapting models that autonomously integrate sub-system interactions to comprehensively explain the state of a ship at the system level.
💸 MSC — and Pending Learn More
⚡ EV Dynamic Wireless Mobile Charging
Intelligent scheduling and route optimization for in-motion wireless charging of electric vehicles across urban transport networks.
💸 DOE — NSF CIS — USDOT — and Pending Learn More
🛰 Weather-Adaptive Drones As First Responders
Decentralized on-demand task allocation for heterogeneous multi-agent systems with adaptive multimodal sensor integration.
💸 NASA JPL— VIPC —VDOT —NCDOT — and Pending Learn MoreMy name is John H. Park at ODU. My goal is to develop physically-grounded and mathematically-principled agentic AI frameworks that remain stable, interpretable, and deployable when reality gets messy — from vascular microbot swarms navigating branching capillaries, to drone teams sensing active storms, to maritime agents operating under multi-second communication delays. We don’t separate solvers from learners: our systems treat multi-agent coordination itself as a numerical problem, where convergence, conditioning, and stability are explicit and testable — not assumed. Patented and validated through working prototypes in weather-resilient autonomous first response, microbot drug delivery simulation, urban traffic sensing, and ocean-atmospheric coupling, our research bridges the gap between operator theory and edge deployment, producing closed-loop adaptive AI that performs where black-box heuristics fail.


Data-driven Adaptive AI for Multiagent Autonomy

Vulnerable Multimodal Users Mobility
EV Dynamic Wireless Mobile Charging

Distributed Heterogeneous Autonomous Task Allocation
