
Information-theoretic Multiagent Paths for Anticipatory Control of Tasks (IMPACT)
PI: Park (Single) Sponsor: NSF Robust Intelligence Abstract
Intelligent Data Exploration & Analysis for New & Existing Transportation Technology (IDEANETT)
PI Park (NCA&T), Co-PI Mcbride (NCA&T), Mcdonald (UNC DCRP) Sponsor: NC Transportation Center of Excellence in Advanced Technology Safety and Policy. 1/2020 – 12/2022
Information-theoretic Route Planning for a Heli-Rover Team.
Co-I Park (NCA&T) PI: Ono, Co-I: Otsu, Agha (NASA JPL) Contract: RSA1625294, Sponsor: NASA JPL 4/2019 – 9/2019 Abstract

Developing a Plan for Using Unmanned Aerial Vehicles for Traffic Operations Applications in Virginia.
Co-PI Park (NCA&T), PI Alden (VTTI), Co-PI Coggin (VTTI) VTRC 116038, Sponsor: VDOT 8/2019 – 4/2021 Abstract VTRC WEBSITE

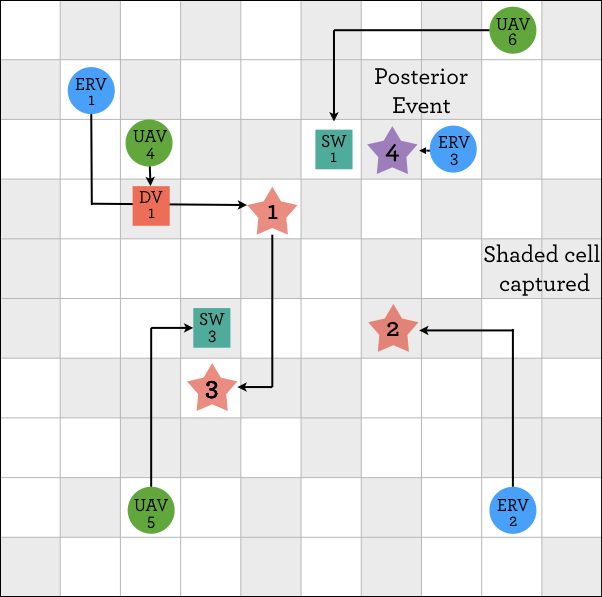
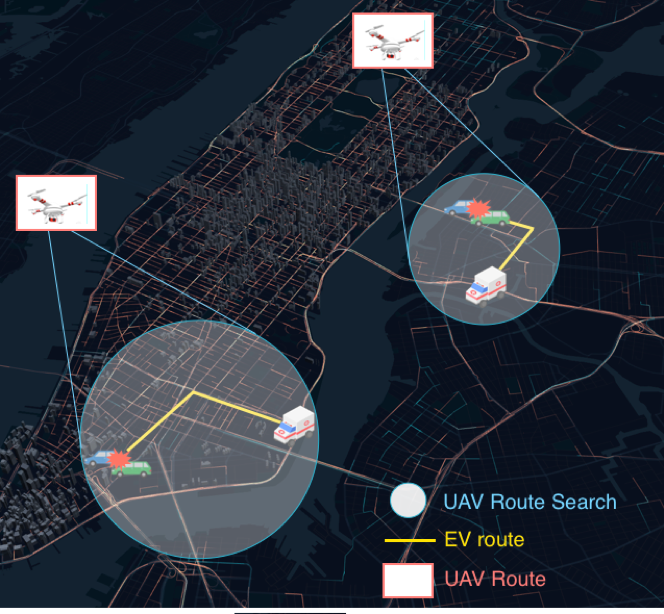
DRONETIM: Dynamic Routing of Unmanned-aerial and Emergency Team Incident Management.
PI Park (NCA&T), Co-PI: Yi (NCA&T), Alden (VTTI) Sponsor: USDOT Tier 1 CATM 2/2019 – 8/2020 Abstract Exhibit F
Information-theoretic Route Planning for Ground Vehicles.
2018 & 2019 Visiting Professor Park (NCA&T) Sponsor: NASA JPL Collaboration with Robotics Group PI Ono 5/2018 – 8/2018, 5/2019 – 8/2019 Abstract
Research Outputs
DRONETIM: Dynamic Routing of Unmanned-aerial and Emergency Team Incident Management. J.Darko, Y. Acquaah, L. Folsom, H. Park, A. Alden. Proceedings of the The 99th Annual Meeting of TRB2020, #20-02283, 2020.
One thought on “Information-Theoretic Navigation”