
Project Overview
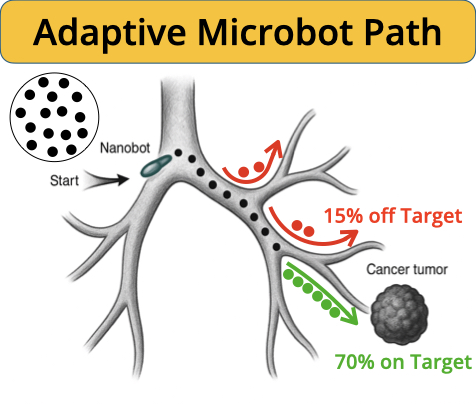
Lung cancer kills more Americans annually than breast, colon, and prostate cancers combined, yet fewer than 1% of intravenously administered agents reach the tumor, perpetuating severe off-target toxicity. We are currently working on building magnetically guided therapeutic microbots offer a physically distinct solution, but their clinical translation is blocked not by hardware limitations but by the absence of a navigation system capable of operating safely inside a living, breathing, beating human lung. This research will develop and validate a closed-loop adaptive navigation framework–grounded in patient-derived lung cancer imaging, a 150-patient CFD cohort, and 3D-printed vascular phantoms–to make intravascular microbot drug delivery clinically viable for pulmonary oncology and extensible to broader vascular-targeted therapies.
Research Objectives
[To be Updated]
Team
Dr. John H Park, Dr. Winifred M. Lo (EVMS), Dr. Mohamadmahdi Samandari, Dr. Jae H. Lee, Dr. Sujatha Alla, Aditya Nimmagadda, Nagesh Bheesetty
Publications
[1] Sujhata Alla, Nagesh Bheesetty, and Hyoshin Park. Informative path planning for nano-surgical robot adaptive drug delivery. In IEEE 59th Annual Conference on Information Sciences and Systems (CISS), volume IEEE Information Theory Society, Johns Hopkins University, 2025. [2] Nagesh Bheesetty, John H. Park, Sujatha Alla, Mike Lee, Mohamadmahdi Samandari, Winifred M. Lo, and Aditya Nimmagadda. Information-theoretic path planning for safe and adaptive nanobot drug delivery. In Journal of Robotics (Revision), 2026.